|
|
8. OTHER SEISMOLOGICAL TOPICS. THE AEGEAN MICRO –
PLATE ROTATION.
Abstract
The kinematics of the Aegean micro-plate is studied in relation to
the forces acting upon it, through the African and Anatolian plates'
motion. The net result of these forces is a counter clockwise (CCW)
rotational motion of the Aegean micro-plate, combined with a SW
drifting component, as far as it concerns the internal Hellenides,
while a clockwise (CW) rotation is considered applicable to minor
tectonic blocks for the external Hellenides.
The postulated, physical-mechanical model, justifies the presence
of different morphological, tectonic, volcanic, seismological and
geophysical (paleomagnetic) features which have already been
observed and studied by many researchers.
Moreover, the kinematics rotational, postulated model, through its
tectonic implications, justifies the location and presence of the
already known geothermal fields, mineralization deposition, at
various sites and concentration of radioactive elements at places.
Finally, the rotational velocity of the Aegean micro-plate is
determined by taking into account the observed plate deformation
velocity and its recorded seismicity.
8.1 Introduction.
The plate tectonics theory, which was developed on early sixties,
was validated and adopted by the majority of the scientific
community. The majority of the geological phenomena, which were
observed on the surface of the Earth, are due to tectonic plates,
relative to each other, movement, caused by the heat convection
currents which are located underneath. Due to this heat convection
mechanism, the Earth's lithosphere has been divided into a few major
plates, as shown in the following figure (8.1.1).

Fig. 8.1.1.The
major, lithospheric plates of the Earth (after USGS).
Kinematics studies of the plates, all over the world, have provided
details for the direction of movement of each plate. The latter is
presented in the following figure (8.1.2).
 Fig. 8.1.2. World
plate kinematics is presented (Heflin et al. 2001, JPL,
NASA).
The Greek territory forms part of a major, seismic belt that starts
at the Indian Ocean and extends up to the Atlantic Ocean and is
bounded by the African, the Eurasian and the Anatolian plates. Due
to the collision of these three plates, at the Greek area, the
majority of the seismic activity of the eastern Mediterranean area
occurs in the Greek territory (Jackson and McKenzie, 1988).
The earthquakes that occur in Greece are caused by stress release
which was accumulated from the local lithospheric plates motion
(Cox, 1973). The focal mechanisms, of the triggered earthquakes,
depend on the temporary stress conditions of each focal area (compressional
- extensional stress field), and therefore, normal faulting, strike
slip faulting, over thrust faulting or / and mixed type, can be the
fault plane solution of each, triggered earthquake.
The Greek territory is compressed from west by the Adriatic plate,
from south by the African plate, while from east it is compressed by
the Anatolian plate. The combined effect of these compressing forces
is that the Greek territory drifts towards southwest (McKenzie 1972,
1978, Papazachos et al. 1989).
In the following figure (8.1.3) are shown the lithospheric plates
that occupy the Greek regional area (McKenzie, 1972). The arrows
indicate the corresponding motion of each micro-plate.
The Greek area consists of two micro-plates, the North Aegean plate
and the South Aegean plate. The North Anatolian Fault separates
these two plates.

Fig. 8.1.3.
Relative motion of Greek micro-plates presented, by McKenzie
(1972).
A detailed study of the movement of the same area was presented by
McClusky et al. (2000). The GPS technique was applied and the
results are presented, assuming Eurasia fixed (fig. 8.1.4) and
Anatolia fixed (fig. 8.1.5).

Fig. 8.1.4. GPS
horizontal observed velocities. Eurasia fixed (McClusky et
al. 2000).

Fig. 8.1.5. GPS
horizontal observed velocities. Anatolia fixed (McClusky et
al. 2000).
Detailed information and different geodynamic mechanisms that apply on
the Aegean - Anatolia area were presented by Doglioni et al. (2002).
The key element of this model is that the Aegean - Anatolian plates
are subjected to extension and therefore, the observed horizontal
velocities, increase towards the southwest direction.
In the same study (Doglioni et al., 2002), the main directions and
tectonic meaning of Miocene-Quaternary faults in western Anatolia
and Aegean, due to the southwest extension, were calculated and are
presented in the following figure (8.1.6), while a pictorial
presentation of the Aegean - Anatolian extension is presented in
figure (8.1.7).

Fig. 8.1.6. Main
directions and tectonic meaning of Miocene-Quaternary faults
determined in western Anatolia and Aegean (Doglioni et al.,
2002).

Fig. 8.1.7.
Aegean - Anatolian extension. Greece (B) overrides the
African plate (A) faster than Cyprus and Anatolia (C) (Doglioni
et al., 2002).
A different point of view, concerning the tectonics of the Aegean
plate, was presented by Rotstein (1985). The key element of this
model is the concept of "side arc collision".
The term is used to describe the interaction of subducted, oceanic
lithosphere with continental lithosphere in a subduction arc, where
oblique subduction occurs. In the Hellenic arc “side arc collision”
is proposed for the Northeast corner near Rhodes. The latter is
presented in the following figure (8.1.8).

Fig. 8.1.8.
Subduction, in the eastern part of the Hellenic arc that
shows the zone of oceanic-continental interaction (side arc
collision) is presented in a simplified sketch. The arrow
indicates relative plate motion across the subduction arc (Rotstein,
1985).
The southern part of the Aegean plate, particularly the region of
Crete, was studied by onshore-offshore wide-aperture seismics (Bohnhoff
et al. 2001). The depth of investigation reached the crust - mantle
boundary. The crust of the region of Crete was identified to be
continental, with maximum thickness of 32.5Km below northern Central
Crete, thinning towards the North and South to 15 and 17Km.
A generalized map of the main, tectonic elements of the south
Aegean region is presented in the following figure (8.1.9).

Fig. 8.1.9. The
main, tectonic elements of the south Aegean region are
presented in a generalized map. The gray shades indicate
1000m steps in water bathymetry (Bohnhoff et al., 2001).
The detailed study of the drift velocity of the Aegean micro-plates
(De Bremaecker et al. 1982) indicated that the southern Aegean part
drifts faster than the northern one. This is presented in the
following fig. (8.1.10).

Fig. 8.1.10. Drift
velocity finite element model for the Aegean area, after De
Bremaecker et al. (1982).
Papazachos et al. (1996) have adopted a different approach for the
kinematics of the Aegean micro-plates. The deformation velocity of
the regional seismic sources was estimated and presented, in a map
form, in the following fig. (8.1.11).

Fig. 8.1.11. Greek
seismic sources deformation velocities, after Papazachos et
al. (1996).
The main character of this map is the large deformation values
which are observed at the southern Aegean plate, where large
compressional forces control the stress field, while at the northern
Aegean micro-plate are observed smaller values of deformation
velocity, along with extensional forces.
Apart from the previous studies, other researchers have studied the
regional Aegean area and Eastern Mediterranean, too. Hatzidimitriou
et al. (1985) studied the seismic parameter (b) in relation to the
geological zoning of the Greek territory, Papazachos et al., (1986)
studied the seismotectonic properties of the same area, Papadopoulos
(1989), Liakopoulou et al. (1991) presented the main seismotectonic
features of the Hellenic Arc and the Aegean Sea, while Hanus and
Vanek (1993) presented a different zoning for the seismically active
areas of the Greek territory.
In contrast to the mainly seismological methods which were used for
the previous studies of the Greek area, Thanassoulas (1998) used
gravity data in order to delineate the narrow, seismically active
zones, where strong (Ms>6R) earthquakes occur.
In this study, that concerns the plate kinematics of the Greek
territory, an entirely different approach, is adopted and a
completely different, physical - mechanical model, is postulated.
This model complies, quite well, with other geotectonic
observations, presented, to date and moreover it explains some of
them, which had not been very clear or well justified, yet.

8.2. The theoretical model.
The theoretical model which is postulated for the Aegean Sea,
basically, consists of two mechanical sub-models. The first one is
the rotational sub-model. In this sub-model the basic adopted,
driving mechanism, is a rotational moment. The second one is the
thrust model. The thrust mechanism is adopted and considered to be
applicable at the center of the stress-subjected area.
These two mechanisms are presented in detail as follows:
8.2.a. The rotational moment model.
Let us consider a pair of forces F1 and F2 which act simultaneously
in opposite direction, upon a solid object and at different
positions upon it (fig. 8.2.a.1). The result of this force scheme is
the development of a rotational moment (P) that tends to rotate the
solid body as the circular vector indicates, in figure (8.2.a.3).
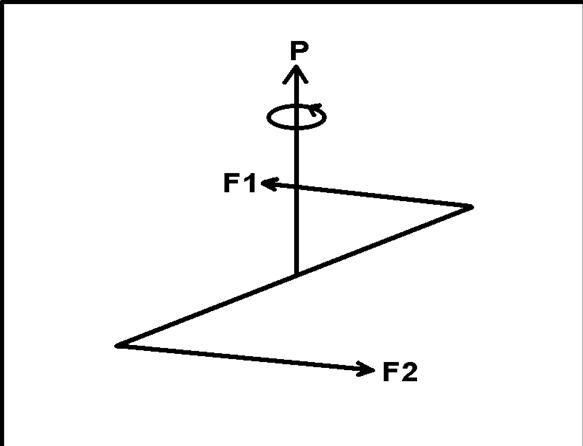
Fig. 8.2.a.1.
Rotational moment vector (P), developed, by a pair of forces
F1, F2 that act in opposite direction.
A more complicated case evolves, when more than a pair of forces
acts upon the same object. This is demonstrated in the following
figure (8.2.a.2).

Fig. 8.2.a.2. Synthesis of total rotational moment vector ΣΡ as a result
from different forces F1, 2, 3, 4 in effect, that give rise
to moment vectors P13, P23, P34.
The forces F1, 2, 3, 4, randomly oriented in space, can be analyzed
into orthogonal components, so that finally pairs of forces, which
can be utilized, develop rotational moment vectors, P13, P34, P23 of
the same or opposite direction. These moment vectors can be summed
up in to a total rotational moment vector ΣP that characterizes the
solid object.
Next, we consider a highly viscous media, where a specified,
circled area is affected by the forces F1, 2, 3. The total
rotational moment, which is developed, following the previous
mechanism, forces the central part of it to rotate, as the thick
arrow indicates.

Fig. 8.2.a.3. The
rotational, mechanical model that is generated by the
application of forces F1, 2, 3 on the inner part of the host
material (stable area) is schematically presented.
As a result, of the rotational action, three areas can be
distinguished. Generally, the first one is the stable area, where
the effect of the applied forces F1, 2, 3 is null. The second one is
the rotating area, where the rotating effect has its maximum value.
In between these two, a third area exists, where rather rotation
diminishes, in magnitude, towards the stable area or increases
towards the central (rotating) area. This is called the transition
zone.
Furthermore, in the brittle transition zone, the following
mechanism can take place. Smaller media blocks are forced to follow
a clockwise rotational movement so that there is mechanical motion
compatibility between i.e. inner counterclockwise rotational motion
and the outer, stable area. This is schematically presented in the
following figure (8.2.a.4).

Fig. 8.2.a.4.
Schematic presentation of the resulting, relative,
rotational movement of the distinct sub-areas of the
previous, mechanical model, (a) stable area, (b) transition
zone, (c) clockwise (CW) rotating block, (d)
counter-clockwise (CCW) rotating plate.
8.2.b. The thrust model.
Next case is the thrust model. Let us consider a media where an
interface (B-B) exists and (A-A) is its upper surface. If forces (1)
and (2) compress both sides in opposite direction, the net effect is
either an upward or downward movement of each side, depending on the
magnitude of the two forces. This is demonstrated in the following
figure (8.2.b.1).

Fig. 8.2.b.1.
Schematic presentation of forces (1, 2) applied, on movable
media, separated by an interface, where sliding takes place.
Symbols V and h denote the vertical and horizontal
components of the forces 1, 2.
As long as the interface B-B is laterally extended, then fracturing
lineaments, on the surface of the media, can be observed parallel to
the trace of the interface B-B and the media surface.
Suppose now, that the previous thrust mechanism is applicable only
to a narrow, restricted area of the media. In this case, the
following fracturing pattern is generated on the surface of the
media, due to mainly extensional, mechanical reasons. This is
schematically presented in the following figure (8.2.b.2).

Fig. 8.2.b.2.
Radial fracture zones are shown developed, by an upward
stress field, applied, to the center of the medium.
These two mechanical models, the rotational model and the thrust
one, are applicable, as it will be demonstrated, in the following
presentation, both of them on the Aegean micro-plate. Moreover,
these two models interpret many geotectonic observations made to
date.
8.3. Forces applied to the Aegean micro-plate.
The Aegean micro-plates, as a result of the geotectonic studies,
available to date, are affected by three main forces. The Anatolian
(Turkish) plate (TPF) through its southwest applied movement is the
first one. This force (TFP) pushes the Aegean micro-plates towards
southwest against and on top of the African plate. The African plate
subducts the Aegean micro-plates and therefore, applies the second,
northeast force AFPF to them. This force (AFPF), partly, opposes the
southwest movement of the Aegean micro-plates, while, more or less,
the Adriatic plate force (APF) which exhibits the same behavior is
the third one. This schematic mechanism is shown in the following
figure (8.3.1).

Fig. 8.3.1.
Schematic presentation of the forces, applied, to the Aegean
micro-plates, due to the Adriatic (APF), African (AFPF) and
Anatolian (TPF) plate movements.
Kinematics studies of the Aegean plate have, as a
result, presented several proposed models. McKenzie (1970)
introduced the "rigid blocks" model, consisted of three
micro-plates, South Aegean, NW Aegean and Anatolia. A different
model, consisted by two blocks, eastern and western was proposed by
Taymaz et al. (1991). Further more, Le Pichon et al. (1995) proposed
the one rigid block model (S. Aegean - W. Anatolia), rotating
counter-clockwise.
Papazachos et al. (1998) presented a more detailed, geotectonic
configuration of the regional Aegean area. This is shown in the
following figure (8.3.2).
The main features of this map are the collision fronts of the
moving plates, while very important are the values of the velocities
which are observed for their movement.
The African plate moves, as it is stated in the map,
with a velocity of 10mm/y towards north.
The Anatolian plate moves with a velocity of 25mm/y
towards west.
The Aegean plate moves with a velocity of 45mm/y
towards southwest.

Fig. 8.3.2. Plate
tectonic configuration is shown of the area around the
Aegean (Papazachos et al. 1998).
As a result of the previously presented, tectonic - kinematics
status of the Aegean region and the forces acting upon it, it is
justified to consider the generation of a rotational moment in it
and, therefore, the mechanical rotational moment - thrust model is
applicable in the Aegean area. The validity of this model depends
on, whether it provides with justification the different geological
- tectonic - geophysical and seismological observations made for the
Aegean region to date.
For this purpose, the postulated, theoretical model, which is
presented in the following part of this study, will be compared with
the various results, which exist from different studies that refer
to the Aegean region.
8.4. Morphological data.
The morphology of an area depends on the tectonic processes which
the same area was undergone in the geological past. Orogenesis,
faulting, fracturing, compression, extension of the geological units
taking place in an area, result in its final morphology. In the
reverse order, to some extent, the morphological features of an area
are capable of revealing the tectonic processes and generating
mechanisms that had tectonically controlled the specific area in the
geological past.
Consequently, the topographic and bathymetric relief of the Aegean
region provides with the basic elements for its initial, tectonic
approach. This map is presented in the following figure (8.4.1).

Fig. 8.4.1.
Bathymetric and shallow seismicity map of the regional area
of Greece (AUTH, 1985) is presented.
An overall, large-scale inspection of this map reveals the presence
of a largely extended circular feature. Part of it, located at the
north Aegean region, conforms to the North Anatolian Fault, while
another part of it, at the southern Aegean region, conforms to the
trench which is located south of Peloponnese, Crete and Rhodes. In
between these two segments, there is a gap, extending from North
Evoia - Biotia and Central Peloponnese, where this circular feature
is just visible, due to rough change in the topographic relief.
In the Western part of Turkey, this circular feature is directed
towards northwest and diminishes in the Aegean Sea. This circular
feature merges with the linearly extending, Ionian trench, close to
the northwest part of Peloponnese. The circular and the linear
morphological features of the Aegean area are highlighted with a
thick dashed red line, so that its identification is made easy. The
latter is presented in figure (8.4.2). Directional filtering or
pattern recognition techniques can reveal the same tectonic pattern.

Fig. 8.4.2. Main
tectonic circular and linear features, observed (tectonic
axis, red dashed line), in the regional area of Greece.
The circular character of the Central Aegean region is revealed at
a first approximation. This area is separated from the Adriatic
plate, the Anatolian plate and the Eurasian plate with boundaries,
indicated, by the thick, dashed, red line. The fact that the
Anatolian plate moves westwards, while the African plate, in respect
to the Aegean plate, generates strike slip faults (Bohnhoff et al.
2001) in the southeast part of it, is a first indication for the
generation of a wider counter clockwise rotational moment which is
applied on the Aegean plate.
8.5. Volcanic data.
Large scale and intense tectonic events that affect the lithosphere
facilitate the magma to rise up to the surface and consequently lava
manifestations of volcanic origin are generated. The motion of the
lithospheric plates, generally, shifts gradually the initial
location of the lava flow location. The well known motion of the
back arc volcanic arcs is in association to this mechanism.
In the case of the Aegean plate, the lava manifestations have been
mapped and dated. These are presented in color code in the following
figure (8.5.1). Although, at a first glance, its spatial
distribution looks rather not connected to the tectonics of the
Aegean plate, if we take into account its dating and combine it to
the counter clockwise rotational moment which was suggested earlier,
then the following relation outcomes.
The lava manifestations conform in their generation time, from most
recent (0-11my) to the older ones (16-26 my) with the central Aegean
plate, with the exception of the oldest ones, which are located,
northern from the North Anatolian Fault. This is presented in the
following figure (8.5.2).

Fig. 8.5.1.
Volcanic manifestations are presented, in Greece (Tacticos,
1999, Thanassoulas et al. 1999), in relation to the deep,
lithospheric fractures (Thanassoulas, 1998). The color code
is as follows: Purple = 0-11my (Quaternary - Pliocene),
Brown = 11-16 my (Upper Miocene), Green = 16-26 my (Middle -
Lower Miocene), Red = 26-36my (Oligocene).

Fig. 8.5.2. Time evolution of the volcanic
activity is presented, during the past 36 my. 1 = probable center of the lithospheric vortex,
2 = estimated vortex boundaries, 3 = North Anatolian Fault,
4 = probable outer vortex boundaries (Thanassoulas et al.
1999).
Assuming a CCW rotation of the southern Aegean plate and the
corresponding original lavas manifestations, which were originated
westwards initially, the latter have traveled along (black arrow) a
path of almost 500Km. By taking into account an average velocity of
2.5cm/y for the motion of the southern Aegean plate, it results in
20my, in time needed for this travel length. This time span complies
well with the dating of the lava manifestations which are observed
in the Aegean plate.
Generally, the Aegean plate behaves as a lithospheric vortex (Thanassoulas
et al. 1999), following a CCW rotation that modifies the location of
the lava flows which were generated some million years ago,
elsewhere.
8.6. Geophysical paleomagnetic data.
Paleomagnetism is a very effective and powerful tool (Irving, 1964;
Beck, 1980; Van der Voo, 1993) in studying geodynamic models and
particularly in its documentation. Paleomagnetic studies in Greece
are dated back to 60s and they were performed by Bobier (1968) on
Pliocene volcanics. This was followed by more intense research, on
the same topic, by Pucher et al. (1974), Papamarinopoulos, (1978),
Kondopoulou, (1982), Laj et al. (1982).
A review paper for the paleomagnetic results which are obtained in
Greece to date was presented by Kondopoulou (2000). Results of
Cenozoic age indicate different rotating character along the
Hellenic arc (Kissel and Laj, 1988). Clockwise (CW) rotation was
found in the west, counterclockwise (CCW) in the east and no
rotation in the south. These results comply with other data,
obtained, by Horner (1983), Horner and Freeman (1983), Lovlie et al.
(1989), Marton et al. (1990). Independent rotation of blocks, fault
bounded, was reported by Mauritsch et al. (1995) for the external
zones of Albanides.
Clockwise rotation (CW) was identified for the Ionian Islands by
Duermeijer and Langereis (1999). For Crete, Duermeijer et al (1998)
reported counterclockwise (CCW) for the most of the studied sections
of the Tortonian and Messinian (9.7 - 6.7 Ma). Similar rotations (CCW)
were reported by Duermeijer and Langereis (1999) east of Crete, in
Plio-Pleistocene sediments on the islands of Rhodes, Karpathos, and
Kassos.
Walcott and White (1998) suggested an East Aegean block with
prevailing counterclockwise (CCW) rotations. In Eastern Aegean -
Western Anatolia strong CW rotation (Karaburun) and strong CCW (Izmir)
are observed (Kissel et al. (1986a). Furthermore, data from Chios
Island indicated a CCW rotation since the Middle - Miocene (Kondopoulou
et al. 1993a, b). CW rotations were observed along an E-W transverse
from the Mesohellenic Trough to the Greek Rhodope (Kondopoulou and
Westphal, 1986; Kissel and Laj, 1988; Westphal et al. 1991;
Kondopoulou, 1994). Atzemoglou (1994) suggested CW rotation for the
area extending, from the Strymon valley to west Xanthi in the East
and from Kavala to Greek-Bulgarian borders.
CCW rotations were reported further to the east in the Pontides,
along the North Anatolia Fault and Biga peninsula (Saribudak, 1989;
Platzman et al. 1994). For the eastern side of the Aegean, Sonder
and England (1989) and Taymaz et al. (1991) proposed CCW rotations,
while Westaway (1990a, b) suggested that most of the domains in
W.Turkey rotate in CCW mode. Jolivet (1993) proposed a rotation pole
in the eastern part of the Aegean and extension in this area
proceeds through a CCW rotation about this pole. Le Pichon et al.
(1995), using geodetic data from Greece suggested a CCW rotation
that agrees with paleomagnetic results, obtained, in Chios and Izmit
(Kondopoulou et al. 1993a, b)
In Argolis area, paleomagnetic data from Jurassic carbonates
indicated CW rotation (Morris, 1995). In Central Greece, data,
obtained, on Triassic formations (sub-Pelagonian lavas) indicated a
CW rotation in Tertiary while a CCW rotation was determined before.
CCW rotation was also found by Pucher et al. (1974). Sequences of
Mid-late Triassic were studied in the Pelagonian (Morris, 1995) and
resulted in a CW rotation. In studying Rhyolites of Upper
Carboniferous to Lower Triassic in the Serbomacedonian massif (Turnell,
1988) a CCW older rotation was followed by a CW younger one.
Kondopoulou (2000), summarizing all the mentioned, afore,
rotational results concluded that the CCW rotation prevails in the
internal Hellenides, while CW rotations are applicable for the
external Hellenides.
This concluded paleomagnetic model, in practice, complies with the
rotating, mechanical model, presented in fig. (8.2.a.4). The
internal Hellenides correspond to the CCW (d) rotating plate, while
the external Hellenides correspond to the CW rotating blocks (c),
located, in the transition zone (b). The pair of CCW rotation of the
internal Hellenides and the CW rotation external Hellenides must
exist, so that mechanical, rotational compatibility is maintained
through out the Aegean area.
The fact that CW and CCW rotations are found in discomforming
places is attributed to the very local rotations of independent,
small blocks, which were created by the local, lithospheric
fracturing.
8.7. Geophysical gravity data.
8.7.1. Gravity deduced fracture zones.
Forces, applied, on a solid material, may produce fracturing in it
and consequently, motion of the produced blocks. In a larger scale,
i.e. the Aegean plate, forces, acting upon it, produce different
tectonic results, as generation of faults, orogenesis, rotation of
the different blocks, generation of shields, relocation of
geological formations, just to mention some of them. As a result of
this mechanism, the gravity field of the Earth is modified
accordingly and therefore, it is possible, by inversely modeling of
the gravity field, to study the tectonics, stratigraphy and
generally the mass distribution in 3D form in the under study area.
The methodology of converting the gravity field into deep,
lithospheric, fracture zones was firstly introduced by Thanassoulas
(1998). Major faulting produces large gravity field horizontal
gradients, which are observable into the corresponding gravity maps.
The procedure is straightforward and consists of transforming the
original Bouguer anomaly map, through a transformational operator,
into a horizontal gradient map. Peak axes of gradient values denote
the existence of lithospheric, fracture zones. The latter is
presented in the following figure (8.7.1.1). The used operator
required a 10x10 Km grid of original data and its length was 20Km.
Therefore only deep fracture zones are detected, of large
wavelength, which, mostly, are not visible on the ground surface by
the geologists and therefore, have not been mapped, yet.

Fig. 8.7.1.1. Deep,
lithospheric, fracture zones, mapped, by the analysis of the
gravity field, in Greece (Thanassoulas, 1998)
The inspection of the map in
figure (8.7.1.1) reveals two groups of deep fracturing. The first
one shows a circular character, while the second one shows a radial
one.
8.7.1.1 Circular fracture zones.
This group of fracturing (fig. 8.7.1.1.1) is highlighted by the use
of thick, black, dashed lines. It is remarkable, the way the
concentric circles comply with almost all the fracturing of this
mode. The approximate center of the circles is located in the
central Aegean region, while part of the circles expands over
western Turkey.

Fig. 8.7.1.1.1.
Circular mode of the deep, lithosperic, fracture zones in
Greece.
The last trace of a circular, fracture zone is detected in the SW
area of the Ionian Sea, while at the western part of Turkey
fractures are missing, due to lack of gravity data in this region.
The question, that comes up immediately, is how these circular,
fracture zones were generated. This is answered by the postulated,
rotational, mechanical model for the Aegean plate (fig. 8.2.a.4). As
long as the central part of the Aegean plate rotates, in a CCW mode,
then fracturing occurs, tangentially, along circles of rotation and
therefore, main fracturing of the lithosphere will occur along the
circumferences of these circles. The main cause of the circular,
fracturing is the differential velocity of adjacent, fracturing
areas, due to velocity change from zero (external stable area a) to
a certain value, applicable to the inner, rotating plate (d) of the
Aegean region.
8.7.1.2 Radial fracture zones.
The second fracturing group presents a radial mode and is
highlighted by solid thick black lines. This is presented in the
following figure (8.7.1.2.1).

Fig. 8.7.1.2.1.
Radial mode of the deep, lithosperic, fracture zones in
Greece.
The fracturing pattern which is indicated in figure (8.7.1.2.1) can
be explained in a mechanical way (fig. 8.2.b.1), by the uplift of
the central Aegean region, due to some deeply located uprising
material. Since the lithosphere upraises, there is a radial
expansion developing stress, which generates this radial kind of
fracturing.
The cause of such uplift was presented in the tectonodynamics
literature (Doglioni et al. 2002). According to Doglioni's proposed
model, the African lithosphere subducts the Aegean plate, but in the
central Aegean region, the African lithospheric slab folds and
upraises, producing in this way, radial, lithospheric fracturing in
the Aegean plate. The model, proposed, by Doglioni et al. (2002), is
presented in the following figure (8.7.1.2.2).

Fig. 8.7.1.2.2.
Cross-section cartoon showing that Greece lithosphere (B)
overrides Africa (which is considered as fixed (A)) faster
than Anatolia (C), generating extension between B and C. (Doglioni
et al. 2002).
It is possible that the uplifted slab of the African lithosphere
simultaneously undergoes a CCW rotational movement, too.
As immediate implications of these type of deep, lithospheric,
fracturing, are the generation of:
(a) geothermal fields along these fracture zones /
faults shown in figure (8.7.1.2.3).

Fig. 8.7.1.2.3. The
known geothermal fields (red circles), in relation to the
deep, lithospheric, fracture zones, mapped, in Greece (Thanassoulas
et al. 1999).
(b) hydrothermal manifestations shown in the following
figure (8.7.1.2.4).

Fig. 8.7.1.2.4. The
known hydrothermal manifestations (purple circles) are
shown, in relation to the deep, lithospheric, fracture zones
in Greece (Thanassoulas et al. 1999).
And
(c) uranium bearing deposits, shown in the following
figure (8.7.1.2.5).

Fig. 8.7.1.2.5.
The
uranium bearing deposits manifestations (red circles), in
relation to the deep, lithospheric, fracture zones in Greece
(Thanassoulas et al. 1999).
8.8. Seismic data.
The postulated rotating, mechanical model for the Aegean plate must
be reflected, too, in the seismicity of the Greek territory. As a
first approach, the seismic hazard map of Greece (Papazachos et al.
1989) is presented in figure (8.8.1). The main characteristics of
this map are, that large-scale, discrete, seismic, hazard zones of
the Aegean region are concentric. Zone (I), of the lowest hazard is
located in the center of the Aegean and is surrounded by zone (II).
The next zone (III) extends from the Ionian Islands to the Hellenic
arc and the west part of Turkey, while minor areas distort the more
or less circular pattern of the seismic hazard zoning of the Aegean
region.

Fig. 8.8.1. The
seismic hazard map of Greece (Papazachos et al. 1989) is
presented. The different hatching indicates seismic hazard
zoning (I = lowest, IV = highest).
A slightly different picture is presented in the lately released (OASP,
2004), seismic, hazard map of Greece. In this map only three zones
are distinguished, but still the first two of the lowest value of
seismic hazard retain their circular character, even though it is a
bit distorted. This map is presented in the following figure
(8.8.2).

Fig. 8.8.2.
Seismic hazard map of Greece (OASP 2004) is presented.
Since the fracturing of the lithosphere, follows a tangential
pattern, in accordance to the circular fracturing following the
rotation of the inner micro-plate of the Aegean region, in the same
way, the observed seismicity in the Aegean area must exhibit a
similar pattern. To this end, the seismicity of the Greek area was
studied for different time intervals as follows:

Fig. 8.8.3.
Seismicity on the 13th October, 2004 is shown registered by
NOA in Greece.
A single day's seismicity of Greece is shown in figure (8.8.3). At
a first glance, these EQs seem to have occurred randomly in space.
If a circle is considered in the same area (red circle), a
meaningful result comes out. These EQs occurred along tangential
fracturing at the cir-cumference of the rotating micro-plate of
central Aegean.
The same test was applied over a longer period of 12 days. The
results are shown in the following figure (8.8.4).

Fig. 8.8.4.
Seismicity is shown for the period from 3rd October to 15th
October, 2004 registered by NOA, in the Greek territory.
It is clear that the seismicity of this period of time can be
grouped into three circum-ferences of circles which approximately
have the same center.

Fig. 8.8.5.
Seismicity (Ms >5.0 R) is shown, registered, by NOA, for
2004, in the Greek territory.
In figure (8.8.5) is considered the seismicity for an even longer
period (a year) and magnitude Ms>5.0R. Similar observations can be
made for this case, too.
The same circular pattern is present in the seismic potential map (Thanassoulas
and Klentos, 2003) of Greece. Actually, seismic energy stored in a
strain form in the lithosphere, must exhibit the same behavior as
the seismicity of the same area.
Finally, the seismicity for the period 1950 - 2004, 5.0>Ms>4.5R of
the Greek territory was considered and is presented in the following
figure (8.8.6).

Fig. 8.8.6.
Seismicity (5.0>Ms>4.5 R) is shown, registered, by NOA, for
the period 1950 - 2004, in the Greek territory.
It is obvious that the circular pattern which controls the
generation, in space, of the EQs, in the Aegean plate, is the rule.
The hypothetical, main, tangential axis, along which the seismicity
occurs, is presented by the blue dashed line in the following figure
(8.8.7).

Fig. 8.8.7. Most of the seismicity of the Greek territory evolves along
the main axis (blue dashed line), due to CCW rotation of the
Aegean micro-plate.
A final observation in figure (8.8.7) is that, intense seismicity
occurs along the collision of the Adriatic plate and the Aegean one.
This process generates the linear axis of the seismicity which is
observed at the northwest part of the Greek territory, while towards
the Anatolian plate (east of the Aegean plate) northeast-southwest
lineaments indicate the presence of intense, tectonic elements of
the same direction.
8.9. The postulated kinematics Aegean micro-plate
model.
By taking into account all the previous observations and
theoretical, physical models, it is suggested that, basically, there
is a southwestward drift of the Aegean micro-plate. Simulta-neously
the Aegean plate rotates CCW. This is schematically presented in the
following figure (8.9.1).
 Fig. 8.9.1.
Combined, main southwestward motion and CCW rotation of the
Aegean micro-plate is presented.
This model is valid for the internal Hellenides, while in the
external Hellenides a simultaneous CW rotation is valid for specific
peripheral tectonic blocks.
In terms of the previously presented micro-plate models this
movement is presented in the following figure (8.9.2). Minor
tectonic blocks of CW rotation are not presented.

Fig. 8.9.2. The
Aegean area postulated tectonic model of. A, C = southwest
movement, B = counter clockwise (CCW) Aegean micro-plate
rotation.
8.10. Conclusions.
It has been shown that, the postulated, rotational model, for the
Aegean region, justifies, through a physical mechanism, the results
of the different studies which are made to date and concern the
Aegean kinematics. The observed, large scale, morphological data,
the different results from paleomagnetic studies, the suspected,
corresponding, CCW rotational model, the deep fracturing of the
lithosphere which is obtained from gravity data, the location of
hydrothermal manifestations, uranium deposits and known geothermal
fields, they all conform with the proposed model.
Moreover, the proposed, rotational model provides with a new point
of view, as far as it concerns, the velocity distribution of the
Aegean plate movement. The low deformation (extensional) velocities
which are observed in the northern Aegean area (Papazachos et al.
1996), according to the postulated model, may be well attributed to
the small difference, in the same direction southwest, of the larger
CCW rotation velocity of the rotating block of the Aegean plate and
the smaller in value velocity of the southwest drift of the Aegean
as a rigid block, as well. The opposite is valid for the southeast
region of the Aegean region. At this place, the CCW rotation of the
inner plate of the Aegean region is opposite to the southwest drift
of the Aegean, as a rigid block, and therefore, the rotating and
drifting velocities are added up, in collision, thus, resulting in a
larger deformation velocity.
The later is demonstrated in the following figure (8.10.1).

Fig. 8.10.1. The
circle represents the CCW rotating, Aegean micro-plate. B,
C, are locations in the rotating, Aegean micro-plate and A,
D are locations in the Turkish plate. VA,
VB, VC, VD
denotes the velocities valid at each location.
VB is composed by the two velocity components which act on location
B. The first one is the SW drifting velocity of the entire Aegean
micro-plate, while the second one is the rotational velocity of the
Aegean micro-plate at location B. At location B, VA and VB are
co-directional, therefore, the relative velocity which is observed
between locations B and A is:
VAB = VA - VB
(8.10.1)
The very same analysis is valid for location C, except from the
fact that the rotational velocity is in opposite direction in
respect to the SW drifting velocity VD of location D.
Therefore, the following equation is valid:
VDC = VD + VC
(8.10.2)
Consequently, equation (8.10.1) suggests extensional forces acting
on the northern part of the Aegean area, while equation (8.10.2)
suggests compressional forces acting on the
Southeastern part of the Aegean area. In general, the change of
direction of the rotational, velocity component of the Aegean
micro-plate, in a CCW sense, modifies, accordingly, gradually the
deformation velocities which are observed in the Aegean area. The
latter complies very well with the observations made by Papazachos
(1996) and are presented in figure (8.1.11). More or less, the same
is applied to the model, proposed, by De Bremaecker et al. (1982).
The next step, in this study, is to try to figure out the
rotational velocity of the Aegean plate. The procedure which was
adopted is as follows:
Let us recall figure (8.1.11).
 Fig. 8.10.2.
Greek, seismic sources deformation velocities, after
Papazachos et al. (1996).
It is assumed that the extensional and compressional deformation
velocities, which are observed at the northern and southern part of
the Aegean plate, correspond to the combined effect of the
rotational velocity (Vr) of the Aegean plate and of the SW-ward,
drifting velocity (Vd) of it. The value of the extensional
deformation, observed, at the northern part of the rotating Aegean
plate, is almost 8mm/year, while the value of the compressional
deformation velocity, observed, at the southern part of the Aegean
plate, is 24mm/year. Consequently, the following equations hold:
Vr - Vd = 8mm/y
(8.10.3)
Vr + Vd = 24mm/y
( 8.10.4)
Solving equations (8.10.3) and (8.10.4) for Vr it is calculated
that:
Vr = 16 mm/year
(8.10.5)
Moreover these observed velocities, following the postulated,
rotating, mechanical model, are tangential to the perimeter of the
rotating Aegean block (fig. 8.10.3).

Fig. 8.10.3. The
rotating Aegean block is represented by a circle. a =
angular velocity, R = radius of the block, S-S distance in
mm traveled within a year (Vr).
Therefore, the following equations hold:
Vr = a * R
(8.10.6)
a = 2 * π * T-1
(8.10.7)
where T-1 denotes the rotational frequency of the Aegean
plate. The average radius (R) of the rotating block is estimated
from the following figure (8.10.4).

Fig. 8.10.4.
Estimated average value of radius R of the rotating block
is: R = 290Km.
From equations (8.10.6) and (8.10.7), the period for a full
rotation of the Aegean block is calculated as:
T = 2πR/Vr = 6.28 * 290 * 106 / 16 = 113.8mY
(8.10.8)
This result and the seismicity pattern of figure (8.10.4) imply
that the Aegean block has completed, at least, a full rotation since
the Upper and Middle Jurassic, when the Orogenesis and the large
scale, tectonic events took place in the Hellenic area. Its actual
start can be some million years back in the geological times (Middle
and Lower Jurassic).
A remark, concerning the reason of the absence of intense
seismicity in the central Aegean region, must be made. According to
this model, since the inner plate rotates, the most central parts of
it are less subject to tangential stresses (which are the main cause
of earthquake generation) so it results in less seismicity, which is
reflected in the seismic, hazard map of Greece, the seismic
potential map of Greece and in the seismicity map of Greece for the
period 1950 - 2004. This is a completely different explanation from
the one which is believed by the seismologists, who suggest that a
liquid magma plum is ascending in the same area.
Finally, as long as the Aegean block rotates, the occurrence of a
strong earthquake, anywhere on its perimeter, changes its stress
load tangentially and therefore, it is more likely for another
strong earthquake, provided that the stress load is adequate, to
occur in a place, so that the mechanical balance of the rotational
plate will be maintained. Such a place is more or less the symmetric
position on the diameter, connecting the two places of the EQ that
occurred and the next EQ to follow, in the future.
Let us assume that the solid circle represents the Aegean plate
that rotates in CCW mode with a rotation center of (C1). In place
(A), of its circumference, a strong EQ takes place, due to large,
tangential stresses, already accumulated. As a result, the location
of A moves towards the location A’ due to the tangential forces
which are applied at the rotating Aegean plate. In such a case, the
Aegean plate rotational center C1 should move towards the location
C2. This implies that the entire Aegean plate “rolls”, due to
tangentially applied forces. This mechanism is presented in the
following figure (8.10.5).

Fig. 8.10.5. At
the circumference of the rotating Aegean plate (solid
circle) an EQ occurs in place A. The location A moves
towards the location A’, while the center of the rotation
moves from C1 to C2. Dashed circle indicates the new
position of the “rolling”, Aegean plate.
This mechanism is not possible, as long as these forces are applied
all along the circumference of the Aegean plate and represent the
forces that create, solely, the rotational moment only. Therefore,
in a rotating, physical system like this, the occurrence of an
earthquake, anywhere in its perimeter, will induce the occurrence of
another one, in an antisymmetric location, so the that mechanical
rotational moment will be preserved and the rotation center of the
system itself will remain stable. This is presented in the following
figure (8.10.6).

Fig. 8.10.6. A
strong EQ takes place in the circumference (location A) of
the Aegean plate (solid circle). Movement of A towards A’ is
counterbalanced through another antisymmetrically, located
Earthquake, in location B which moves correspondingly to B’.
As a result, the rotational center (C) of the Aegean plate
remains stable.
This mechanism provides a physical explanation of the so-called
"domino effect", observed, by the seismologists in some cases of
strong EQs in the Aegean plate.
It has been shown that, the postulated, rotational model for the
Aegean region, justifies, through a physical mechanism, the results
of different studies, made to date, concerning the Aegean
kinematics. The large scale, observed morphological data, the
different results from paleomagnetic studies, the suspected
corresponding CCW rotational model, the deep fracturing of the
lithosphere obtained from gravity data, the location of hydrothermal
manifestations, the uranium deposits and the known geothermal
fields, they all conform with the proposed model.
Moreover, the proposed rotational model provides with a new point
of view, which concerns the velocity distribution of the Aegean
plate movement. The observed low deformation (extensional)
velocities in the northern Aegean area (Papazachos et al. 1996),
according to the postulated model, may well be attributed to the
small difference, in the same direction southwest, of the larger CCW
rotation velocity of the rotating block of the Aegean plate and the
smaller, in value, velocity of the southwest drift of the Aegean, as
a rigid block. The opposite is valid for the southeast region of the
Aegean region. At this place, the CCW rotation of the inner plate of
the Aegean region is opposite to the southwest drift of the Aegean,
as a rigid block, and therefore, the rotating and drifting
velocities are added up, in collision, resulting in a larger
deformation velocity.
|
